Introduction to the robotic safety interaction system developed by the mechanical system control laboratory
In modern factories, workers and robots are the two main labor forces. For safety reasons, the two are often separated from the robots in the metal cage, which undoubtedly limits productivity and flexibility of the production line. In recent years, people have begun to focus their attention on the direction of removing cages, so that humans and robots can work together to build a factory where humans and machines coexist. Manufacturers are interested in combining human flexibility with the productivity of robots to create a flexible production line. The potential of industrial joint robots is enormous and extensive. For example, they may be placed in a human-machine collaboration team on a flexible production line in which robotic arms and human workers work together to process workpieces and automated guided vehicles. , AGV) works with human workers to ensure plant logistics. In the future factories, more and more human-computer interactions are expected to occur. Unlike traditional robots that work in a structured and deterministic environment, collaborative robots need to operate in highly unstructured and random environments. The fundamental problem is how to ensure that collaborative robots can operate efficiently and safely in a dynamically uncertain environment. In this article, we will introduce the robotic safety interaction system developed by the Mechanical System Control (MSC) laboratory.

Existing solution
In response to this problem, robot manufacturers including Kuka, Fanuc, Nachi, Yaskawa, Adept and ABB are working hard to provide effective solutions. Nowadays, several secure collaborative robots or joint robots have been released, such as the Collaborative Robots CR series of Japan FANUC, the UR5 of Denmark Universal Robots, the Baxter of Rethink Robotics of the United States, the NextAge of Kawada of Japan, and the WorkerBot of Pi4_RoboticsGmbH of Germany. However, most of these products focus on intrinsic safety, namely safety in mechanical design, actuation and low level motion control. The security in contact with humans, that is, the key to intelligence (including perception, cognition, and high-level motion planning and control) remains to be explored.
Technical challenge
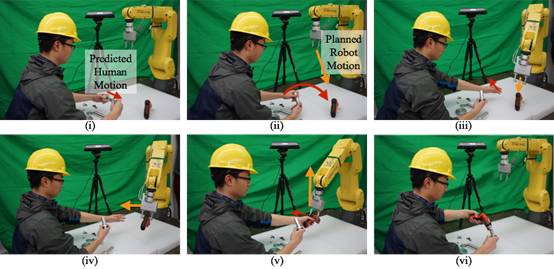
Technically, the behavior of designing collaborative industrial robots is very challenging. In order to make collaborative industrial robots more human-friendly, they should have the ability to collect environmental data and interpret it, adapt to different tasks and different environments, and tailor it to the needs of workers. For example, in the human-machine collaborative assembly process shown below, the robot should be able to predict that once the worker puts the two workpieces together, he will need tools to fix the components. Then the robot should do the next thing and get the tool and hand it over to the staff, while avoiding colliding with the staff in the process.
To achieve such behavior, the challenge lies in two aspects: (1) the complexity of human behavior (2) the difficulty of real-time security without the expense of efficiency. The stochastic nature of human motion creates enormous uncertainty in the system, making it difficult to guarantee safety and efficiency.
Robotic safety interaction system and real-time non-convex optimization
The Robotic Safety Interaction System (RSIS) was developed in the Mechanical Systems Control Lab to establish a way to design robot behavior to ensure the safety and efficiency of peer-to-peer human-computer interaction.
Because robots need to interact with people who have long-term interactions, robots can naturally mimic human behavior. Human interaction may be due to thinking or conditioning. For example, if a rear-end collision occurs, the driver of the rear vehicle may instinctively step on the brakes. However, after a moment of thinking, the driver may accelerate to cut into another lane, thus avoiding chain-tailing. The first is a short-term safety response behavior, and the second is to calculate the current situation, for example, is there enough space to achieve a complete stop of the vehicle, whether there are enough vacancies to replace the lane, and whether the lane being replaced is safe.
We have introduced a parallel planning and control architecture that simulates these behaviors, including long-term and short-term action planners. The long-term planner (efficiency controller) emphasizes efficiency and solves long-term optimal control problems with low sampling rates. The short-term planner (safety controller) further solves the real-time security problem by solving the short-term optimal control problem of high sampling rate based on the trajectory of the efficiency controller planning. This parallel architecture also addresses uncertainty. The long-term planner is planning based on the behavior that others are most likely to make. The short-term planner considers almost all of the behavior that others might do in the short term to ensure security.
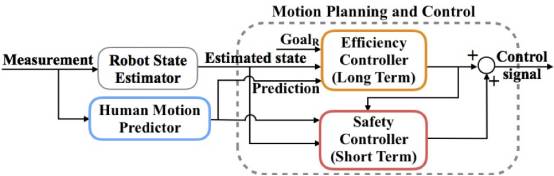
Parallel planning and control architecture in robotic security interaction system
However, robot motion planning in a cluster environment is highly nonlinear and non-convex, so the problem is difficult to solve in real time. To ensure timely response to environmental changes, we have developed fast algorithms for real-time calculations, such as the convex feasible set algorithm (CFS) for long-term optimization and the safety set algorithm for short-term optimization. (SSA). These algorithms achieve faster computations by embossing the original non-convex problems, where we assume that these primitive nonconvex problems have convex objective functions but are non-convex constrained. The convex feasible set algorithm (CFS) iteratively solves a series of subproblems under the constraint of the feasible subset of convex regions. The solution sequence will converge to a local optimum. It has fewer iterations and runs faster than the general non-convex optimization solvers, such as sequential quadratic programming (SQP) and interior point algorithm (ITP). On the other hand, the Secure Set Algorithm (SSA) uses the idea of ​​invariant sets to transform non-convex state space constraints into convex control space constraints.

Convex case in CFS algorithm
With parallel planners and optimization algorithms, robots can safely interact with the environment and efficiently complete tasks.
Real-time action planning and control
Towards Universal Intelligence: Safe and Efficient Robot Collaboration System (SERoCS)
We are now working on an advanced version of RSIS in the Mechanical Systems Control Lab, a safe and efficient robotic collaboration system (SERoCS) that is supported by the National Science Foundation (NSF) #1734109. In addition to secure human-computer interaction (HRI) motion planning and control algorithms, SEROCS includes powerful cognitive algorithms for environmental monitoring and optimal mission planning algorithms for human-machine security collaboration. SERoCS will significantly improve the skills of the joint robot, and reduce or avoid the occurrence of human-machine and machine-machine collision accidents during the operation, so that future harmonious human-machine cooperation is possible.
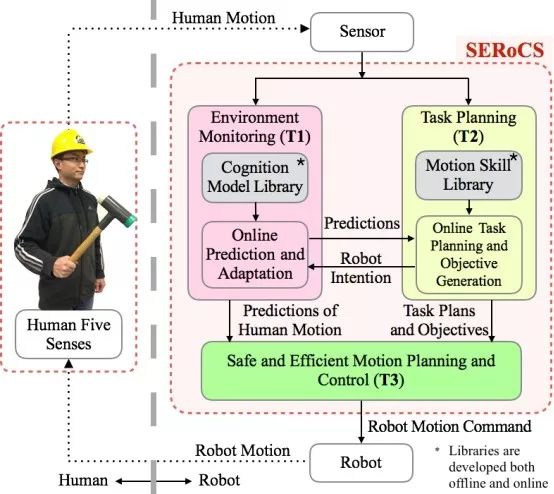
SERoCS architecture
reference:
C. Liu, and M. Tomizuka, “Algorithmicsafety measures for intelligent industrial co-robots,†in IEEE International Conference on Robotics and Automation (ICRA), 2016.
C. Liu, and M. Tomizuka, “Designing therobot behavior for safe human robot interactionsâ€, in Trends in Control and Decision-Making for Human-Robot Collaboration Systems (Y. Wang and F. Zhang(Eds.)). Springer, 2017 .
C. Liu, and M. Tomizuka, “Real timetrajectory optimization for nonlinear robotic systems: Relaxation andconvexificationâ€, in Systems & Control Letters, vol. 108, pp. 56-63, Oct.2017.
C. Liu, C. Lin, and M. Tomizuka, “Theconvex feasible set algorithm for real time optimization in motion planningâ€, arXiv: 1709.00627.
The Future Intelligence Lab is dedicated to studying the future development trend of Internet and artificial intelligence, and observing and evaluating the development level of artificial intelligence. It was founded by Internet evolution author, Dr. Liu Feng of Computer Science and Professor Shi Yong and Liu Ying of the Virtual Economics and Data Science Research Center of the Chinese Academy of Sciences.
The main tasks of the future intelligent laboratory include: establishing an AI intelligent system IQ evaluation system, conducting world artificial intelligence IQ evaluation; developing an Internet (city) cloud brain research plan, building an Internet (city) cloud brain technology and enterprise map, to enhance the enterprise, Industry and city intelligence level services.
DMX Controller
MA Black Horse DMX Controller lighting console
Technical Parameter
1.Intel core 3 generation processor Inter(R) core (TM) i5-3380M CPU
2. 120 GB solid state disk, 8 GB memory, corn I5 motherboard
3.standard 6 DMX output ports and MIDI interfaces, 3072 DMX channels
4. Built-in two 19-inch high-definition touch screens
5.21 program playback putter, 42 program storage function keys
6. 1 main control dimming wheel, 4 attribute coding wheel
7. 1 mian control putter, 2 AB putter
8 Hydraulic screen Angle adjustment support structure
9.size: 82*680*130mm, G, weight: about 56KG with flycase
Our company have 13 years experience of LED Display and Stage Lights , our company mainly produce Indoor Rental LED Display, Outdoor Rental LED Display, Transparent LED Display,Indoor Fixed Indoor LED Display, Outdoor Fixed LED Display, Poster LED Display , Dance LED Display ... In additional, we also produce stage lights, such as beam lights Series, moving head lights Series, LED Par Light Series and
Controller Series,DMX Controller,Console,DMX Console
Guangzhou Chengwen Photoelectric Technology co.,ltd , https://www.cwledpanel.com